GTBZ22S Göni ýaragly howa operasiýa platformasy





I. Önümlere syn we aýratynlyklar
GTBZ22S Göni gol we öz-özi hereket edýän howa operasiýa platformasy ajaýyp öndürijilik, netijelilik, dinamika we aňsat işlemek bilen tapawutlanýar.Iň ýokary göterijilik ukyby 340 kg, ýokary iş beýikligi we amplitudasy, uly ýük we giň iş meýdany gurmak üçin kostýum bilen bu pudakda öňdebaryjydyr.
[Üstünlikleri we aýratynlyklary]
● Iki parallel baglanyşyk we teleskopiki gol, agyrlyk merkeziniň dinamiki sazlanyşyny amala aşyryp biler we doly ulagy has durnuklaşdyrar.
4 4WD, ýoldan daşarky tekerler we ok balans ulgamy bilen, enjam sürüjide we ýolda uýgunlaşmakda ajaýyp.
● Köp ýükli konwert dolandyryş tehnologiýalary ýüküň hakyky wagtyna gözegçilik edip biler, ýokary derejede peýdalanar we işiniň öňdebaryjy ýerinde bolar.
● Awtomatiki deňagramlylygy uzaldýan mehanizm, uzaldylan mehanizmiň howpsuzlygyny ýokarlandyrýar we polat ýüpüň hyzmat möhletini uzaldýar.
● Elektrik dolandyryş ulgamy, awtomatiki tekizlemäni, platforma ýüküniň agramyny, dinamiki gözegçilik we näsazlyk duýduryşyny amala aşyryp, PLC we CAN esasly paýlanan dolandyryş tehnologiýalaryny kabul edýär.
II.Esasy bölekleriň tanyşdyrylyşy
1. Şassi bölegi
Esasy konfigurasiýalar: 2WD, dört tigirli rul, ok deňagramlylygy we köpükli tekerler.
(1) Sürüjiniň iň ýokary tizligi sagatda 6km.
(2) Iň ýokary dereje 45% -Maks.pudagyndaky dereje
(3) Ok balans ulgamy - ulagyň islendik gödek ýoldan geçmek ukybyny ep-esli ýokarlandyrýar.
(4) Dwigateli we reduktory birleşdirýän içerki syýahat reduktory ulanylýar we dürli şertlerde enjamyň sürüjilik talaplaryny kanagatlandyrmak üçin iki sürüş tizligi (ýokary tizlik we pes tizlik) üpjün edilýär.Syýahat mehanizmi eňňitlerde syýahat edende öz-özüni tormozlamak funksiýasyny görkezýär we näsazlyk ýüze çykan halatynda çekmegi ýeňilleşdirmek üçin debriya device enjamy bilen enjamlaşdyrylandyr.
2. Boom bölegi
(1) singleeke teleskoply silindr + sim ýüpüniň 3 bölümli teleskoping gülläp ösmegi.
(2) Boom materialy - ýeňil we ýokary howpsuzlygy üpjün etmek üçin ýokary güýçli polatdan kebşirlenýär.
(3) Dogry + ýokary götermek we şol bir wagtyň özünde ýokary öndürijilikli etmek.
(3) Güýç-berklik gabat gelmegi - Ösüşiň ajaýyp güýjüni we berkligini kepillendirýär.
3. Aýlanýan bölek
(1) Aýlanýan stol 360 ° üznüksiz aýlanmaga ukyply we ulag gulplaryny oturtmak üçin iki deşik bilen üpjün edilýär.
(2) Energetika ulgamy - “Perkins / Deutz” hereketlendirijileri optimal amortizator we ýylylygy bölüp çykarmak ulgamy bilen enjamlaşdyrylandyr.
.
4. Platformanyň bölegi
(1) 2,4m × 0.9m uly iş platformasy.
(2) 160 ° aýlanýan platforma.
(3) 340 kg çenli göterijilik ukyby.
(4) Elektro-gidrawlik proporsional awto-tekizleme ulgamy, platforma burçuna dinamiki taýdan tekizläp, real wagt gözegçilik edip biler.
5. Gidrawlik ulgamy
.
.
. platforma;ýokary gurluşyň esasy klapan plug-in klapan;enjam gidrawlik ýag radiatory bilen oturdyldy.
(4) Işleýän ulgam ýapyk üýtgeýän ulgamdan - ýokary tizlikli we pes tizlikli dişli toparlara bölünen 4 × 4 sürüji görnüşli.Gämi gatnaw gidrawlik ulgamy ok deňagramlylygyny we rul funksiýalaryny ýerine ýetirip biler.
5. Elektrik ulgamy
(1) PLC dolandyryş tehnologiýasy - Aýlanýan stol we platforma üçin hersine bir gözegçilik ediji berilýär.Şassi, aýlanýan stol, bum we platforma gözegçilik etmek üçin degişlilikde şassi aýlanýan stol we platforma üçin dolandyryş gutusy oturdylýar.
(2) Esasy dolandyryş elementleri - Dwigateli gyzdyrmak, başlamak, ýanmak we tizligi dolandyrmak;Motoryň ýag basyşy, sowadyjy temperaturany barlamak we duýduryş;Şassi dolandyrmak we sürmek dolandyryşy;Aýlanýan stol öldürmek we ýokary götermek we teleskoping dolandyryşy;Platforma öldürmek;Platforma ýüküni barlamak;Platforma tekizlemek.
(3) Howpsuzlygy goramagyň köp usullary - hereketlendirijä gözegçilik etmek we goragçynyň işe girizilmegi;ulag serişdesi - egilmek duýduryşy;artykmaç ýüklemek duýduryşy;polat simleriň gowşamagyna gözegçilik etmek.
III.GTBZ22S esasy bölekleriniň konfigurasiýasy
| S / N. | Ady | Mukdar | Bellik |
| Motor | 1 | Perkins / uchaçaý | |
| Syýahat reduktory | 4 | OMNI / RR | |
| Syýahat motory | 4 | DAFOSS / Şengbang | |
| Nasos ýapyk | 1 | REXROTH / Liýuan | |
| Kuwwat birligi | 1 | BUCHER | |
| Platforma klapan topary | 1 | Sant / Şengbang | |
| Aýlanýan klapan topary | 1 | ||
| Syýahat dolandyryş klapan topary | 1 | ||
| Swing silindr | 1 | HELAC / Weihai Liansheng | |
| Krank silindr | 1 | Çengdu Çenggang gidrawlik enjamlary kärhanasy / XCMG gidrawlik bölekleri, Ltd. | |
| Düzelýän silindr | 1 | ||
| Derrik silindr | 1 | ||
| Teleskopik silindr | 1 | ||
| Rul silindri | 2 | ||
| Balans silindri | 2 | ||
| Gidrawlik ýag radiatory | 1 | Yinlun | |
| Dolandyryjy | 2 | XCMG | |
| Aýlanýan ýapgyt datçigi | 1 | Şanhaý Parker Hannifin | |
| Platforma ýapgyt datçigi | 1 | Suzhou Youwell | |
| Agram datçigi | 1 | ||
| Joýstik | 2 | DAFOSS | |
| Aýak wyklýuçateli | 1 | Güneşler | |
| Leňňe podşipnik | 1 | Maanshan Fangyuan | |
| Leeňiji reduktor | 1 | Sýuzhou Keýuan | |
| Swing motor | 1 | Ningbo Zhongyi | |
| Şin | 4 | Laizhou Yishimai |
IV.GTBZ22S-iň esasy tehniki spesifikasiýasy
| Haryt | Bölüm | Parametr |
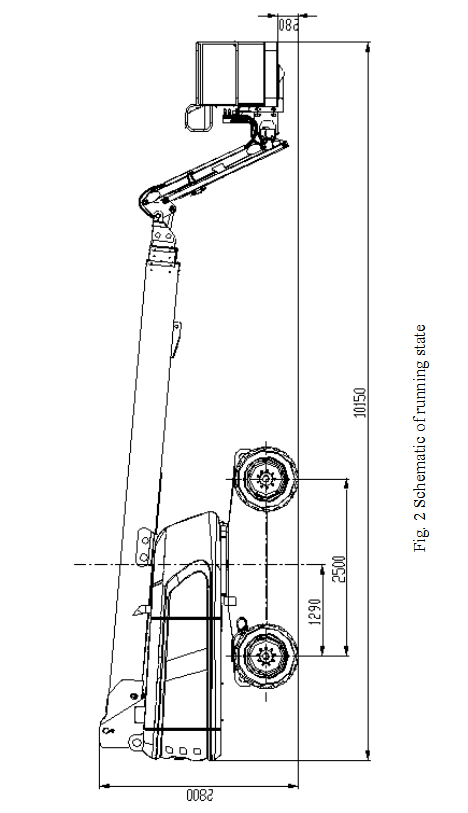
| a.Doly enjamyň umumy uzynlygy | mm | 10150 |
| b.Doly enjamyň umumy giňligi | mm | 2490 |
| c.Umumy beýiklik | mm | 2800 |
| d.Tigir bazasy | mm | 2500 |
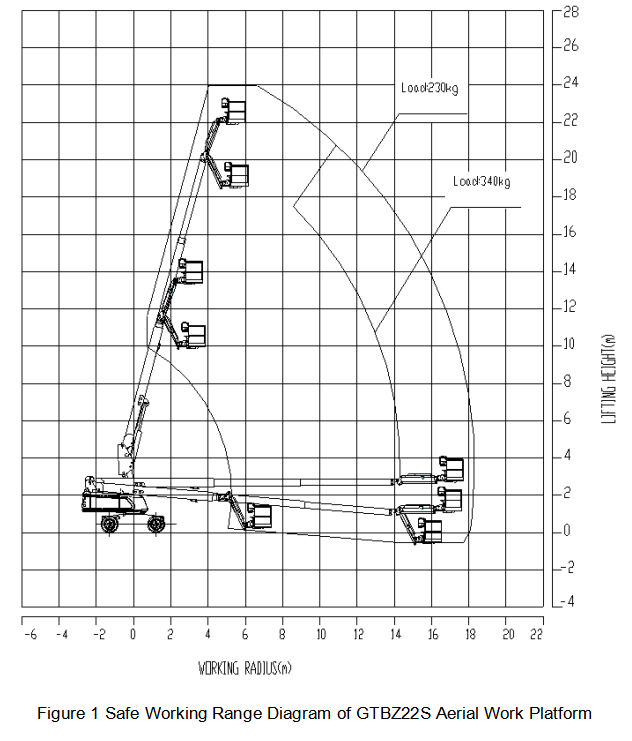
| Iň ýokary iş beýikligi | m | 24 |
| Platformanyň iň ýokary beýikligi | m | 22 |
| Iň ýokary iş aralygy | m | 18.3 |
| Iň ýokary göteriji agram | kg | 230 (Çäksiz) / 340 (Çäk bilen) |
| Güýçli aralyk | ° | -5 ~ +75 |
| Aýlanýan stoluň egri burçy | ° | 360 |
| Iň ýokary arka öldürmek | mm | 1550 |
| Platformanyň ölçegi | mm | 2400 × 900 |
| Platformanyň egri burçy | ° | 160 |
| Umumy agram | kg | 12500 |
| Iň ýokary syýahat tizligi | km / sag | 6 |
| Minimal öwrüm radiusy | m | 6 |
| Grounderiň iň pes arassalanylyşy | mm | 230 |
| Iň ýokary dereje | % | 45 |
| Şinanyň spesifikasiýasy | - | 355 / 55D625 |
| Motor modeli | - | Perkins 404D-22Týuçaý 4D24T00 |
| Motoryň bahasy | kWt / (r / min) | 43 / (2600) 48 / (2700) |
V. Maşynyň ygtybarly iş aralygy diagrammasy
VI.Sürüji ýagdaýy boýunça maşynyň ölçeg diagrammasy